2 Formulación del Proceso de Decisión de Markov
Los estados de nuestro proceso de decisión de Markov representarán la proporción de la población en cada categoría del modelo propuesto por (Pedroza-Meza, Velasco-Hernández, y Acuña-Zegarra 2025):
\(S_{t}\): Fracción de susceptibles en el tiempo \(t\).
\(V_{+t}\): Fracción de vacunados inmunes en el tiempo \(t\).
\(V_{-t}\): Fracción de vacunados no inmunes en el tiempo \(t\).
\(I_{t}\): Fracción de infectados en el tiempo \(t\).
\(R_{t}\): Fracción de recuperados en el tiempo \(t\).
El estado global del sistema en el tiempo \(t\) se presenta como
\[ x_{t} = (S_{t}, V_{+t}, V_{-t}, I_{t}, R_{t}) \]
El escenario que consideraremos para cada \(t \in {0,1,\dots, N}\)para el proceso de Markov:
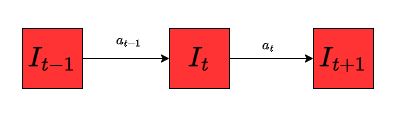
- \(x_{t}\): representa la dinámica de la enfermedad en el tiempo \(t\).
- \(a_{t}\): representa en qué escenario del índice de comportamiento se encuentra la población en el tiempo\(t\).
Algunos supuestos que estaremos considerando para nuestro proceso son:
- Las personas cambian su comportamiento en el tiempo \(t\) de forma instantánea.
- Las únicas personas que pueden cambiar su comportamiento son los vacunados no inmunes.
- Supondremos que las personas cambian su comportamiento bajo una distribución uniforme \([0.5, 2]\).
Bajo los supuestos anteriormente mencionados, consideramos el siguiente Modelo de Control de Markov.
\[ (\mathbf{X}, \{A(x): x \in X\}, \mathbf{P}, \mathbf{C}) \]
donde \(\mathbf{X}\) es el espacio de los estados, \(\{A(x): x \in X\}\) es el espacio de las acciones admisibles, \(\mathbf{P}\) es la ley de transicion de modelo y \(\mathbf{C}\) es la funcion de costo.
En la siguiente figura se ilustra el cambio de un estado a otro por las acciones admisibles. Desarrollaremos la dinámica de la cadena de Markov en las siguientes secciones.