3 Dinámica del Modelo
En esta sección veremos cómo evoluciona el sistema atreves del tiempo \(t\). La dinámica de la enfermedad esta representando por la siguiente cadena de Markov
\(S_{t+1}= \mu -\beta S_{t}I_{t}- (\mu + \phi)S_{t}+\omega V_{+t}+\xi R_{t}\)
\(V_{+t+1}= \phi\_{+}(\sigma)S_{t}-(\mu+\omega) V_{+t}\)
\(V_{-t+1}=\phi_{-}(\sigma)S_{t}- \psi(1-\sigma) \beta V_{-t} I_{t}-\mu V_{-t}\)
\(I_{t+1}= \beta S_{t}I_{t}+\psi(1-\sigma) \beta V_{-t} I_{t} -(\mu+ \gamma)I_{t}\)
\(R_{t+1}=\gamma I_{t}-(\mu +\xi) R_{t}\)
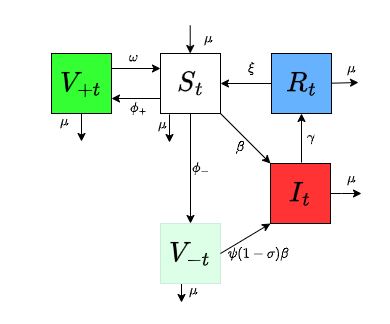
En la siguiente figura es una representacion de la cadena de Markov descrita anteriormente.
Las acciones representan los valores del índice de comportamiento \((\psi)\). Supondremos que los valores del índice de comportamiento están restringidos al intervalo \([0.5,2]\). Las acciones consideradas en nuestro modelo están dividas en tres principales acciones:
Si \(\psi\in [0.5,0.9)\) entonces diremos que las personas se portan bien, es decir, que las personas siguen las medidas de prevención de forma estricta.
Si \(\psi\in [0.9,1.2]\) entonces diremos que las personas se portan normal, es decir, que las personas siguen las medidas de prevención.
Si \(\psi\in (1.2,2]\) entonces diremos que las personas se portan mal, es decir, que las personas no siguen las medidas de prevención.
Supondremos que las personas toman decisiones diarias mediante unas distribución \(x_{t} \backsim Uni[0.5,2]\) el periodo de observación será de un año. Como se ha mencionado con anterioridad el objetivo de este trabajo es encontrar el valor de \(\psi\) que permita tener la incidencia acumulada más pequeña al final del año. Entonces la probabilidad de tener \(i\) de incidencia acumulada y cambiar el comportamiento \(\alpha\) en el tiempo \(t\) y pasar al estado \(j\) está dada por: \[P_{ij}(\alpha)=P[x_{t+1}=j|x_{t}=i,a_{t}=\alpha]\]